
2Dアニメーションソフトウェア
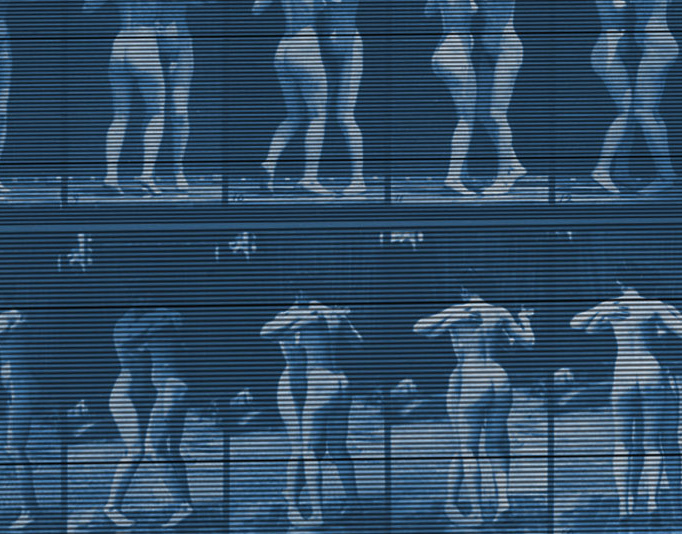
コマ撮りとアニメーション

Lightning Doodle

Deepmotion Animate 3D

Matterport Proカメラ

Matterport

Sketchfab
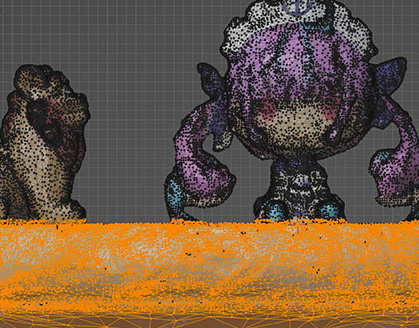
Deleting faces in Blender
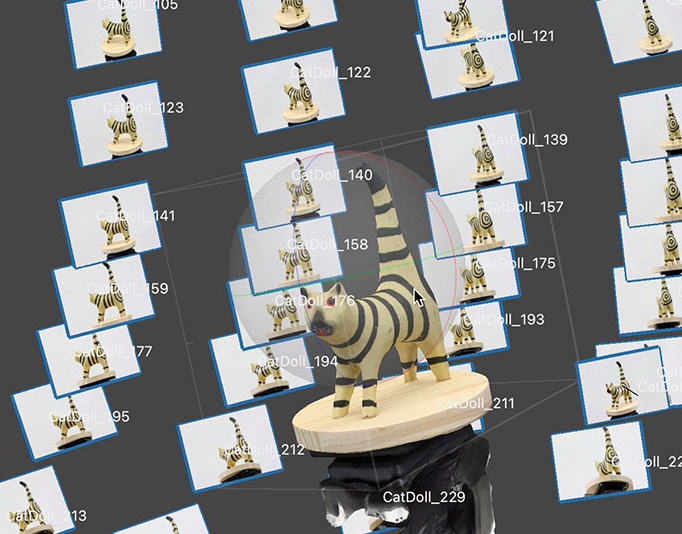
Metashape

Turntable Based 3D Scan System

3D Body Scan

RealityCapture

3D Scanning Overview

Adobe Media Encoder
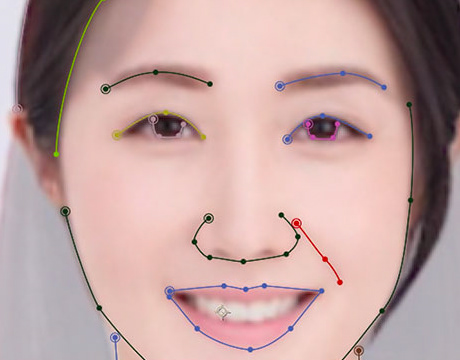
Image Morphing
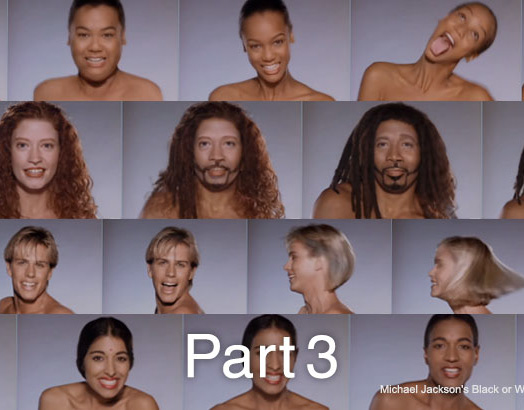
Morphing Part 3
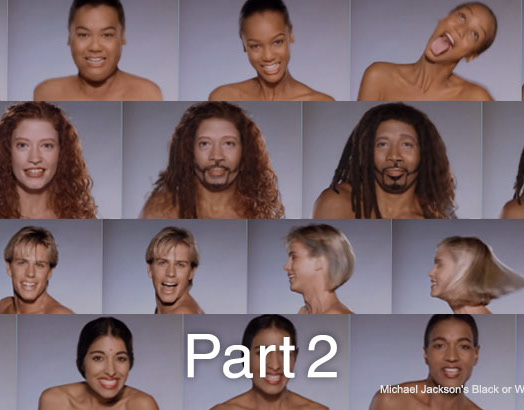
Morphing Part 2

Morphing Part 1

Kinetic Typography Part 3

Kinetic Typography Part 2

Kinetic Typography Part 1

Time Remapping

Puppet Tool

Jumping Grasshopper
Adobe After Effects Part 3
Adobe After Effects Part 2
Adobe After Effects Part 1
Music & Sound Effects Library
音声波形編集
Adobe Premiere Pro Part 4

Adobe Premiere Pro Part 3

Adobe Premiere Pro Part 2

Adobe Premiere Pro Part 1

Smartphone撮影

カメラ・ビデオ技術用語

三脚の使い方
Face Tracking + TouchDesigner
TouchDesigner + Azure Kinect DK
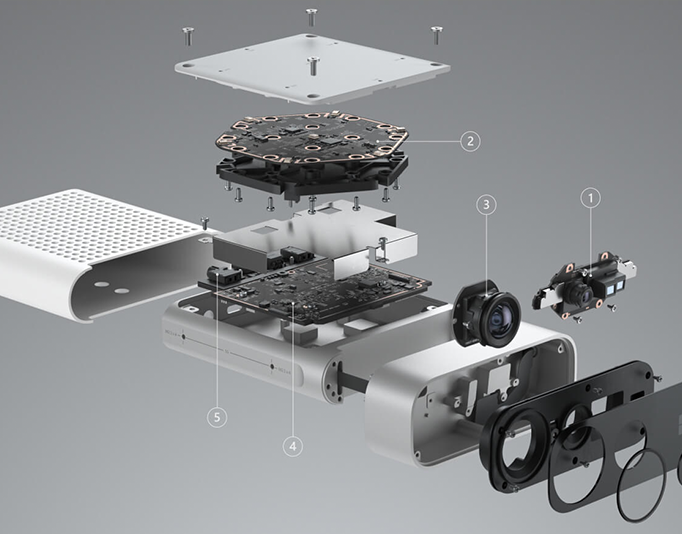
Azure Kinect DK

Slit Scan

Time Displacement

Feedback

Audio Reactive ver.2 - Part3

Audio Reactive ver.2 - Part2

Audio Reactive ver.2 - Part1
TouchDesigner+2D

TouchDesigner基礎
Mixamo

DTP